

di Alan Murarotto
LiDAR vs telecamere: un video controverso!
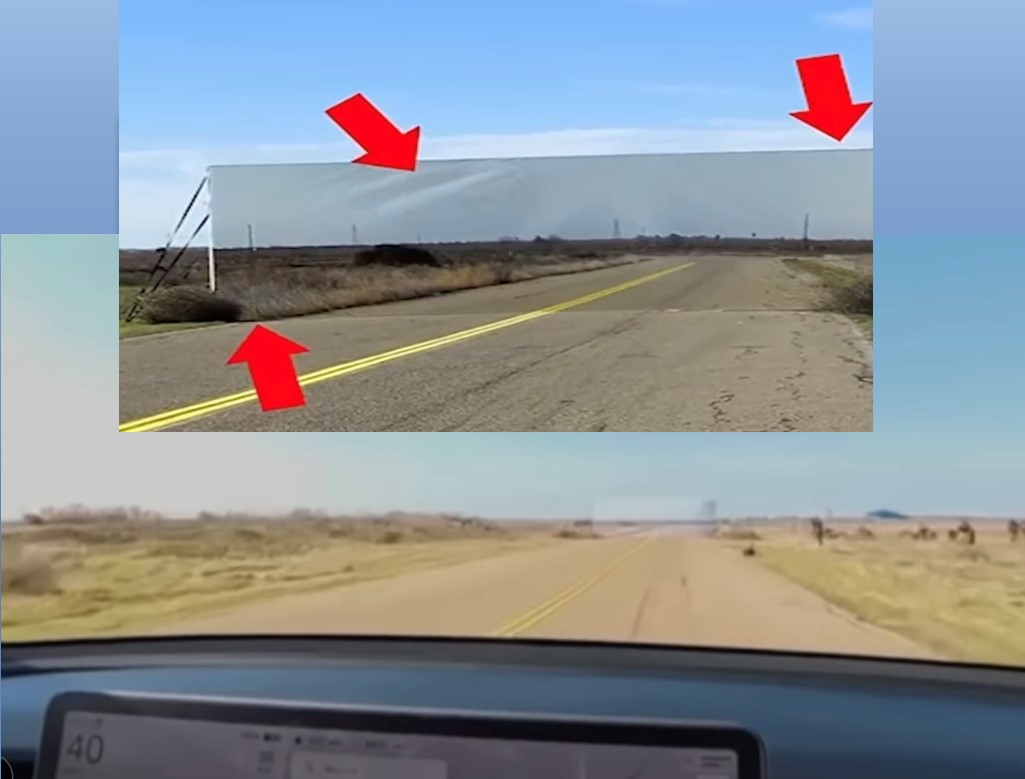
Con questo articolo vogliamo reagire ad un video pubblicato sui social network come YouTube, in cui si vede una Tesla Model Y equipaggiata con il sistema FSD (Full Self-Driving) che si lancia contro un muro di polistirolo che è stato appositamente dipinto con l’unico obiettivo di creare un’illusione ottica (trompe-l'œil) per dimostrare quanto sia facile eludere il sistema di sicurezza del veicolo americano.
https://elettronauti.it/elettrowiki-robotaxi/
L’autore ha confermato che questo video è stato girato almeno due volte, la prima volta hanno effettivamente ingaggiato il sistema FSD (versione software non aggiornata), il sistema a guida autonoma di Tesla è stato attivato troppo tardi e cioè circa 3 secondi prima dello schianto, a 60 km/h circa, a qualche metro dal muro e mantenendo le mani al volante. Tutto questo si può notare dalle riprese e dalla grafica obsoleta del display.
Il risultato di questo video era prevedibile perché tutte le condizioni sono state appositamente create per far fallire il sistema software integrato sulla Tesla e/o su qualsiasi altra auto, presentando in modo errato la realtà dei fatti. Ecco perché è fondamentale avere informazioni tecniche per avere un quadro completo.
Funzionamento delle soluzioni basate sui sensori radar e/o LiDAR
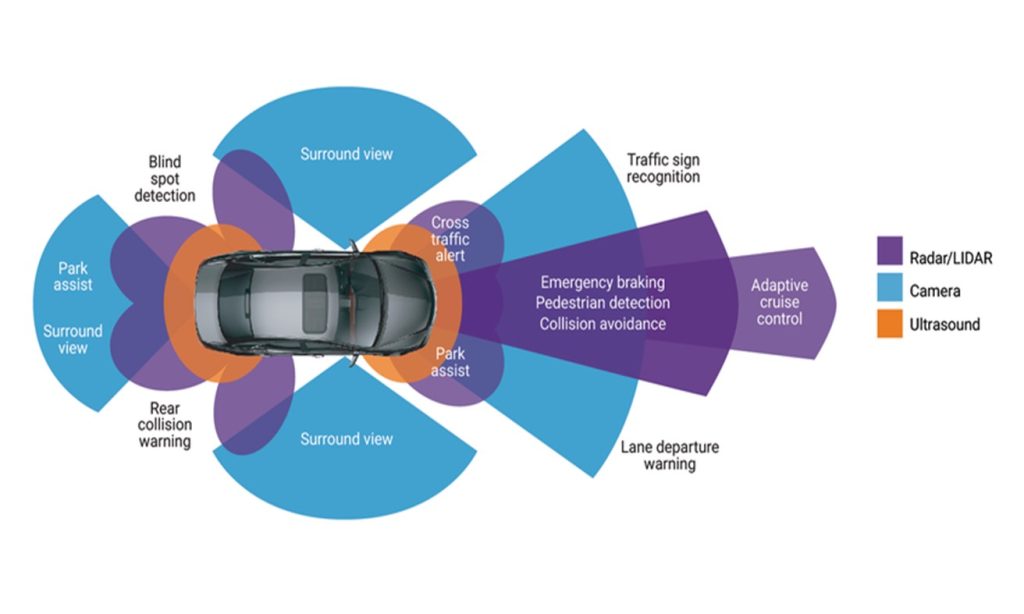
- Sistemi attivi: Radar e LiDAR. Il radar utilizza onde radio, mentre il LiDAR usa impulsi laser per rilevare l’ambiente.
- Sistemi passivi: Le telecamere non emettono luce ma percepiscono l’ambiente in base alla luce riflessa da diverse sorgenti.
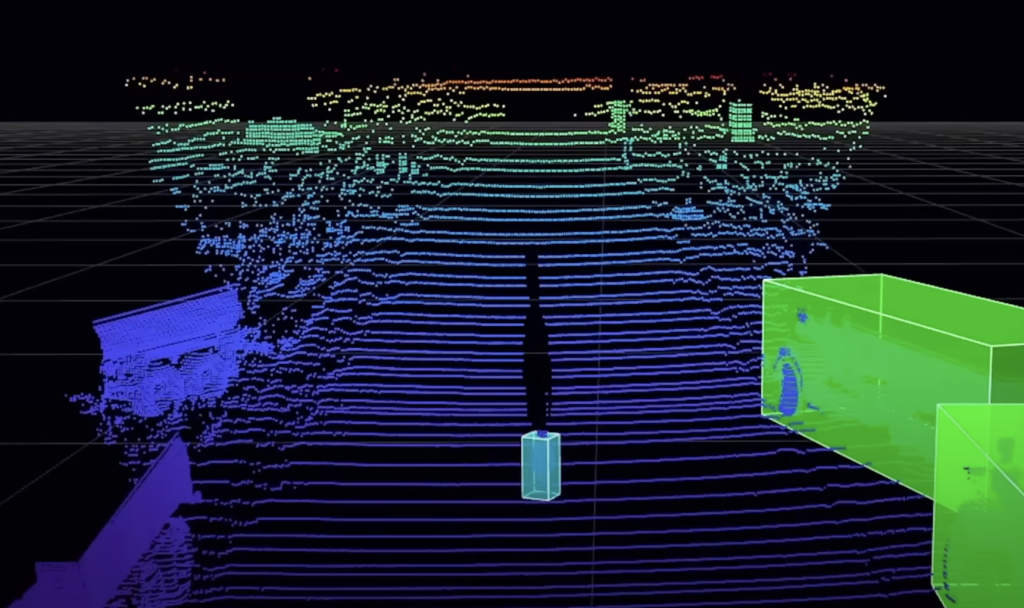
Sia il radar sia il LiDAR, forniscono informazioni sulla distanza degli oggetti, e il software può elaborare questi dati per generare un’immagine 3D approssimativa. Tuttavia, la risoluzione ottenibile è molto inferiore rispetto a una normale telecamera, poiché questi dispositivi hanno sia un trasmettitore che un ricevitore, rendendoli ingombranti e costosi. Questo vale anche per i radar ad alta risoluzione. Insomma, siamo comunque lontani dai 50 megapixel di una fotocamera per smartphone.
Il vantaggio del LiDAR è che genera direttamente una mappa 3D dell’ambiente senza necessità di interpretazione avanzata, ma elaborare immagini tridimensionali richiede una potenza di calcolo enorme. D’altra parte, una telecamera fornisce immagini bidimensionali, ma può ottenere informazioni sulla profondità utilizzando due telecamere (come fanno i nostri occhi), sfruttando effetti ottici come la parallasse.
Il cervello umano e il confronto con i sensori
Un esempio concreto è un grande tennista come Jannik Sinner che riesce a posizionare la racchetta con estrema precisione senza bisogno di radar o LiDAR, ma solo grazie alla potenza di calcolo del cervello e utilizza gli occhi come se fossero sensori.
Questo esempio non vale solo per i grandi atleti, indipendentemente dallo sport praticato, ma anche per noi nelle piccole azioni quotidiane. Alzare un bicchiere, afferrare un oggetto o scrivere al computer. Sono tutti gesti che a noi sembrano ormai banali e semplici, ma che hanno richiesto una fase di apprendimento (da bambini nella maggior parte dei casi) e di pratica. La realtà è che sono gesti complessi. Il cervello, come le CPU e i software dei moderni veicoli, ha il compito di elaborare le informazioni ricevute dagli occhi, i nostri sensori, e in tempi quasi infinitesimali è in grado di coordinare il movimento dei muscoli per eseguire il movimento necessario.
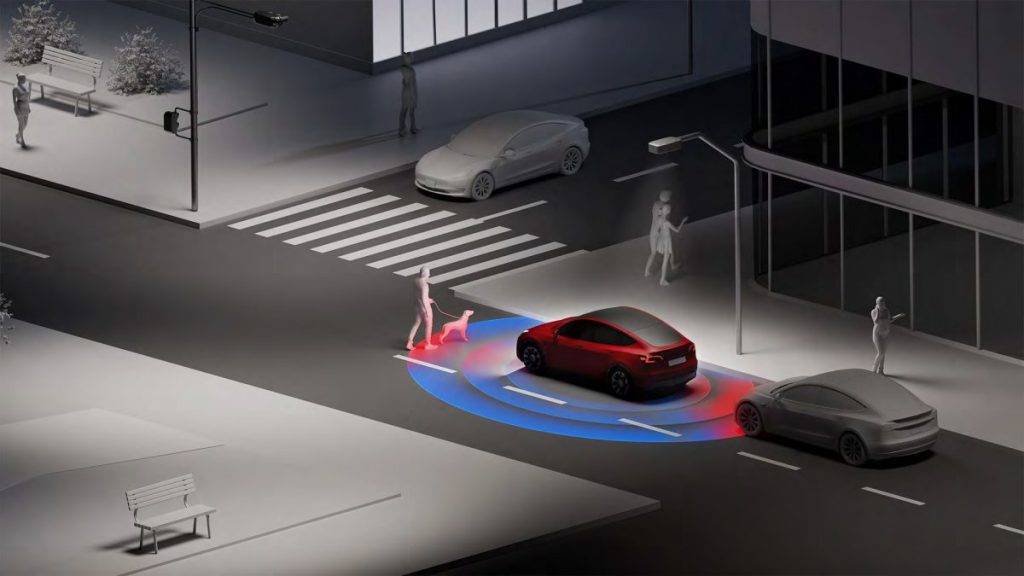
Tutte le vetture con un sistema di guida autonoma o di assistenza alla guida basato unicamente sulle telecamere, la cosiddetta Vision Only, si rifanno al modello umano.
L'illusione ottica del muro di polistirolo e il problema della visione basata su telecamere
Nel caso del test mostrato nel video, il sistema FSD di Tesla, basato solo su telecamere, non aveva alcuna possibilità di percepire il tranello perché anche un essere umano sarebbe potuto essere ingannato dallo stesso tipo di illusione ottica! Un caso simile è avvenuto nel 2016, quando un artista brasiliano ha dipinto un falso tunnel su un muro come omaggio al cartone animato: Willy il Coyote (Wile E. Coyote) e Beep Beep. Alcune auto hanno rischiato d’impattare e un guidatore si è schianto contro il muro per fortuna senza gravi conseguenze perché i conducenti sono stati ingannati dall’illusione ottica. Questo dimostra che un sistema basato su telecamere potrebbe essere tratto in inganno esattamente come l’occhio umano.
Tutto questo dimostra che entrambi i sistemi, LiDAR e telecamere, hanno vantaggi e svantaggi. Probabilmente non esiste un vero vincitore.

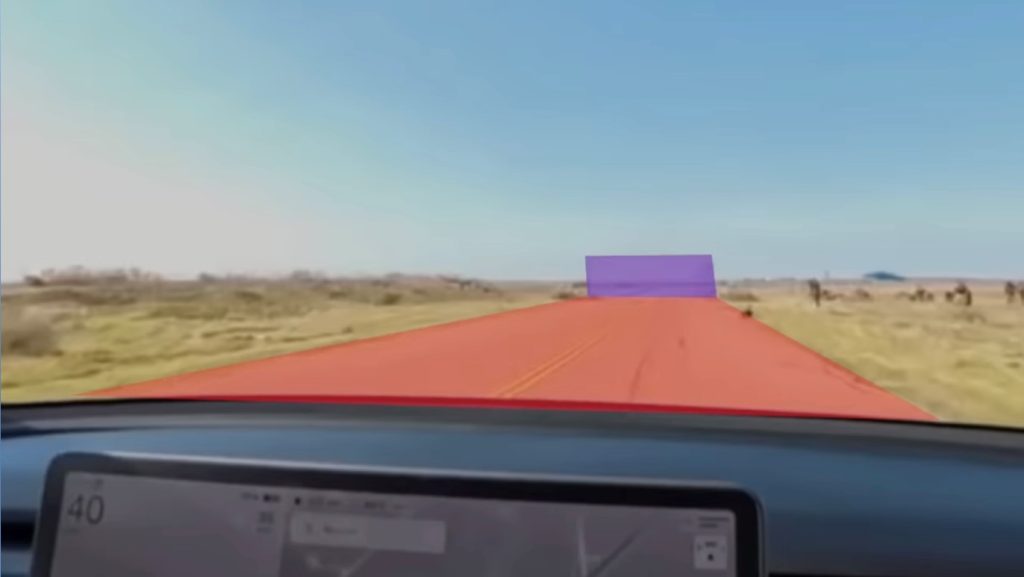
Obiettivo: rilevare l'ostacolo
Sebbene il Full Self-Driving sia stato approvato in Cina a seguito di prove eseguite dopo aver attivato la funzione da fermo e poi effettuando diversi tentativi utilizzando come ostacolo, un voluminoso pannello in plexiglass e ad ogni test dinamico, il sistema Tesla evita il muro trasparente. Tuttavia, il video di cui stiamo parliamo e che troverete in calce in questo articolo, non spiega che anche un sistema basato su LiDAR può essere ovviamente ingannato in altri contesti. Per esempio, se si attraversa un tunnel con gli sprinkler attivati, il LiDAR potrebbe interpretare l’acqua nebulizzata come un ostacolo solido e decidere di fermare bruscamente il veicolo, causando di conseguenza dei tamponamenti. Lo stesso problema si verifica in caso di nebbia fitta, pioggia o neve, rendendo la guida pericolosa in determinate situazioni.
Telecamere vs LiDAR: quale priorità dare ai dati?
Combinare LiDAR e telecamere non risolve automaticamente il problema. Bisogna decidere se dare priorità ai dati del LiDAR o della telecamera, ma in diverse situazioni la scelta corretta deve essere presa in pochi istanti. Inoltre, un sistema che integra LiDAR e telecamere richiede una potenza di calcolo tripla rispetto a un sistema basato solo su telecamere. Se si aggiungono anche radar, la richiesta di calcolo aumenta di 5-6 volte. Questo significa implementare dei computer più potenti, maggiore consumo energetico e un’inefficienza complessiva del sistema.
La soluzione: termocamere
Una possibile soluzione è l’uso di termocamere in combinazione con le telecamere tradizionali. Questo permetterebbe di ottenere immagini stereoscopiche (3D) senza bisogno di quattro telecamere. Ampliare lo spettro visivo, rilevando le differenze di temperatura tra la strada e il muro di polistirolo, impedendo di cascare nell’inganno visivo ed evitando allo sviluppatore software di insegnare al computer a riconoscere un muro dipinto come la strada.
Ovviamente questa tecnologia non si presta solo all'individuazione di un muro, ma potrebbe correttamente riconoscere una persona o un animale oltre una coltre di nebbia o nella pioggia fitta. Condizioni nelle quali sia le telecamere che il LiDAR falliscono. In più il software potrebbe essere anche addestrato a riconoscere una vettura, sia termica che elettrica, riconoscendo sagome e temperature differenti rispetto all'ambiente circostante.
Inoltre, questa tecnologia permetterebbe di ridurre la potenza di calcolo necessaria, migliorando l'affidabilità in qualsiasi condizione meteo.
I sistemi ADAS necessiterebbero di verifiche
I sistemi ADAS dovrebbero essere tarati presso un centro revisioni ogni volta che uno dei suoi sistemi deve subire una manutenzione come per esempio: la sostituzione del parabrezza crepato; interventi sulle videocamere/radar; oppure a seguito di collisioni o micro-collisioni da parcheggio (interventi sulla carrozzeria del veicolo come il paraurti). Anche le condizioni stradali, come strade dissestate o buche, potrebbero influire sulla necessità di una verifica, in caso di allineamento dell'assetto del veicolo e della sostituzione dei cerchi e pneumatici si consiglia vivamente di effettuare la calibrazione.
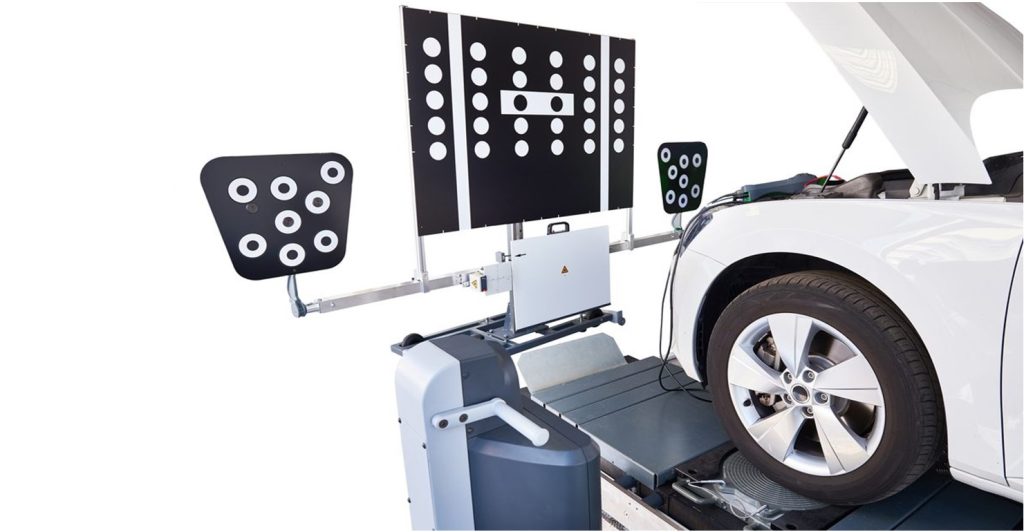
Tuttavia, anche in assenza di questi eventi, è consigliabile effettuare controlli periodici, almeno una volta all’anno, per assicurarsi che il sistema ADAS funzioni sempre al meglio.
Criticità del video divenuto virale
Ci teniamo a precisare che il nostro intento, con questo articolo, non è quello di screditare Luminar o il suo sistema LiDAR di nuova generazione, ma nemmeno quello di insinuare che il sistema FSD usato da Tesla sia per forza di cose il miglior sistema al mondo. Non stiamo cercando un vincitore.
Luminar ha sicuramente sviluppato un sistema LiDAR migliore rispetto a quelli che si sono utilizzano fino ad oggi. Il loro dispositivo con onde da 1550 nm riesce infatti a "vedere" fino a 2-3 volte più lontano proprio in condizioni critiche come pioggia e nebbia, rispetto a dispositivi dotati di tecnologia a 905 nm.
Ci preme spiegare che il test mostrato nel video non è stato condotto con rigore scientifico, come ci si aspetterebbe da un ex ingegnere NASA come Mark Rober, il che è inaccettabile.

Bisogna infatti sapere che il video "incriminato" è stato praticamente sponsorizzato da Luminar, l'azienda che sviluppa l'omonimo sistema LiDAR utilizzato nel video. L'azienda ha fornito allo youtuber americano una vettura, una Lexus, provvista del sistema di nuova concezione sviluppato dall'azienda, ma sotto forma di kit adattato alla vettura, oltre che del loro personale che viene anche inquadrato alla guida della vettura giapponese. Curioso è il fatto che la Lexus utilizzata non è una vettura che di serie utilizza il LiDAR di Luminar. Come curioso è anche il fatto che la Tesla Model Y dello youtuber Mark Rober non avesse il software di gestione della vettura aggiornato. Ulteriormente curioso è il fatto che in effetti esistono alcune vetture che montano di serie il sistema sviluppato da Luminar. Queste vetture sono due modelli di Volvo: la EX90 e la nuova ES90 presentata questo marzo 2025. Sono entrambe vetture di segmento F (Luxury) con prezzi di partenza di 70-80.000 €, rispetto alla Tesla Model Y che parte da circa 45.000 €.
E visto che abbiamo parlato di prezzi, e che in questa vicenda qualcuno ha ricordato - male - le parole di Elon Musk quando disse di "voler utilizzare la Vision Only al posto dei sensori come radar, LiDAR ed affini perché considerati stupidi in confronto alle telecamere", ci si è dimenticati che Musk aggiunse anche il termine "costosi". Il kit di Luminar costa probabilmente come la produzione per interno di una Model 3 o Model Y per Tesla, ovvero 25.000 $. Anzi, forse una di queste vetture a Tesla potrebbe anche costare mano, ora come ora.
FSD o Autopilot?
Un'altra cosa che si evince è che a parte il caso del muro, in cui FSD è stato effettivamente ingaggiato, nei restanti casi il guidatore si è affidato al sistema Autopilot di Tesla (gli ADAS per l'appunto...) e non il sistema di guida autonoma FSD. Benché siano basati entrambi su telecamere i sistemi funzionano in maniera completamente differente. Purtroppo il termine FSD è stato usato nel titolo del video per attirare più spettatori, ma a conti fatti, è stato usato solo in una scena dell'intero video. Ovvero quella del fatidico muro finto. Ed è stato usato anche male perché in un caso la Tesla Model Y di Rober si trova nel centro delle due carreggiate, a cavallo della doppia linea continua, e il sistema viene ingaggiato qualche metro prima dell'impatto, con la conseguenza che il sistema si auto disingaggia da solo visto che il guidatore mantiene entrambe le mani sul volante con una forza eccessiva, impedendo le funzioni di auto sterzata e centramento della corretta corsia di marcia. Nel secondo caso FSD viene ingaggiato con un leggero anticipo ma sempre applicando una forza al volante. La Tesla Model Y, a differenza del nuovo Cybertruck, non è dotata di Steer-by-Wire e che quindi il volante è direttamente collegato alle ruote e che in ogni caso, se il guidatore prende lo sterzo o applica forza sul pedale del freno, i sistemi di guida danno la precedenza al guidatore.
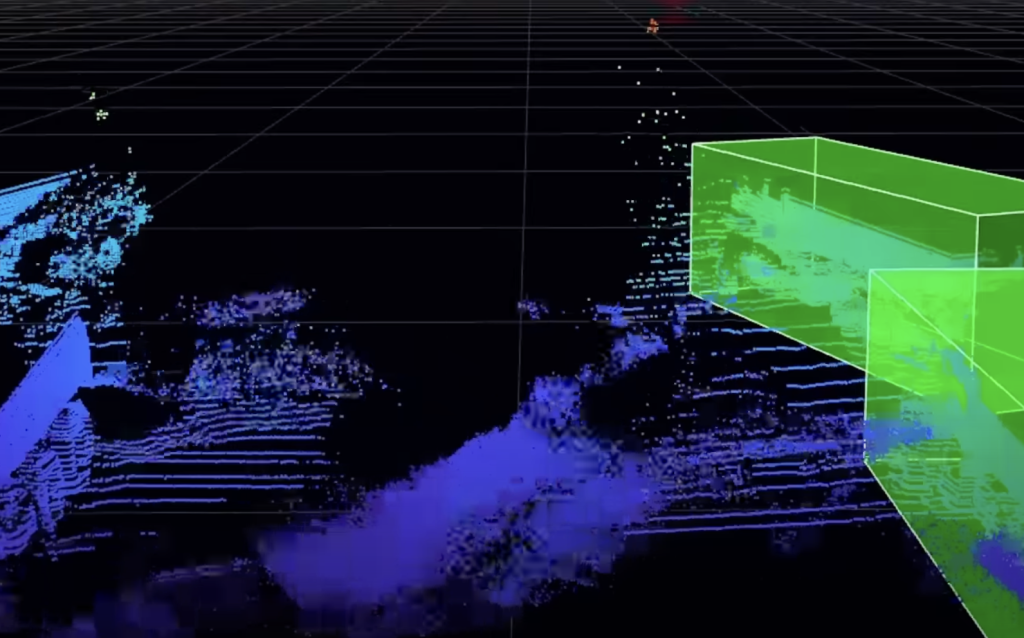
Il LiDAR vede veramente attraverso pioggia o nebbia molto fitta, come mostrato in video?
Ritornando al LiDAR di Luminar, come abbiamo precisato qualche paragrafo sopra, nei casi della pioggia e della nebbia bisogna specificare che le immagine mostrate rispetto a cosa vede il sistema LiDAR non sono per nulla veritiere. Vengono continuamente mostrate le sequenze in cui si vede distintamente la figura umana come un ostacolo, ma non quelle in cui viene mostrato il "muro d'acqua" generato dagli irrigatori e il "muro" di nebbia nell'altro caso. Questo perché come abbiamo già detto, il sistema rileva un ostacolo solido e il software impartisce la frenata automatica indipendentemente dal fatto che dietro a questi ostacoli ci possa essere una persona o un veicolo.
Ed in effetti è ciò che accade anche ai robotaxi di Cruise e Waymo quando scoppiano idranti o si verificano casi simili.
Semplicemente l'auto si blocca perché vede un ostacolo che pensa di non poter attraversare.

Con questo non vogliamo insinuare che il video di Mark Rober voglia solo infangare Tesla e il suo sistema FSD, ma che sia stato volutamente girato in un modo che va a mettere in cattiva luce le problematiche reali e riconosciute del sistema basato su telecamere e che non abbia per niente mostrato i reali motivi del funzionamento del LiDAR di Luminar, facendolo sembrare perfetto al cospetto del "pessimo" Full-Self Drive di Tesla.
Qui sotto abbiamo voluto lasciarvi tre video, che consigliamo di visionare in lingua originale, dove potete vedere il video dell'ex ingegnere NASA Mark Rober che ha scatenato questo putiferio mediatico nei confronti del sistema di guida delle Tesla. Dopodiché abbiamo un altro youtuber americano che ha voluto analizzare le controversie del video di Rober, e che lo ha addirittura invitato a partecipare al video per rispondere ad alcune domande che si era posto. Per ultimo invece abbiamo un utente che ha cercato di ricreare il fondale finto e che la sua Tesla ha correttamente sempre riconosciuto ed evitato, avvalorando i test cinesi che vedevano le Tesla evitare addirittura dei plexiglass trasparenti...
Video originale (consigliamo la visione in audio originale)
Video esplicativo dei punti "deboli" del video di Mark Rober
Test eseguito con Model Y con versione software aggiornata
Conclusione
Non esiste un sistema perfetto, ma combinare telecamere standard, infrarossi e termocamere potrebbe risolvere molte delle attuali problematiche. Sebbene gli errori non possano essere eliminati del tutto, questa integrazione garantirebbe una guida autonoma di livello 5 più sicura in qualsiasi condizione meteorologica. Tuttavia, maggiore è l’intelligenza del sistema, più risorse richiederà, aumentando il consumo energetico e la produzione di calore a causa dell’elaborazione, della memoria e dell’archiviazione dei dati. Di conseguenza, è fondamentale bilanciare l’efficienza energetica e gestire adeguatamente la dissipazione termica.
Nel frattempo, mentre si cerca il giusto compromesso tra affidabilità tecnologica e costi di produzione, i dati sugli incidenti mostrano che Tesla è tra le vetture più efficaci nella prevenzione degli impatti e tra le più sicure per gli occupanti in caso di collisione.
Su questo tema, che intreccia sicurezza e diverse filosofie tecnologiche, voi da che parte vi schierate?

di
Alan Murarotto
Tecnico meccatronico, formatore automotive, professionista della mobilità. Aiuto i lettori a districarsi nel labirinto delle dinamiche che governano la transizione energetica, dalla burocrazia agli aspetti legati alla guida di veicoli elettrici e non solo, con accenni tecnici per una visione a 360°.